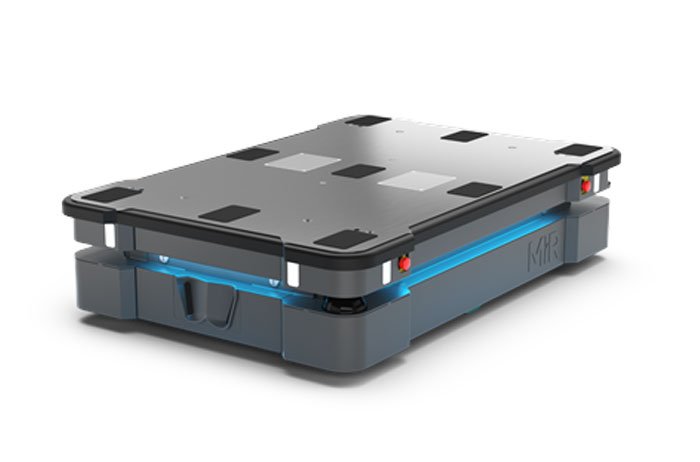
MiR600 是一款适用于各种生产设施、仓库和其他工业场所的自主式移动机器人,能够运输重达600kg的货物和托盘。
用户将利用基于网络的用户界面来控制MiR600(该用户界面可通过PC、智能手机或平板电脑上的浏览器进行访问)。每台MiR机器人都有其自己的网络。请参阅连接机器人界面。MiR机器人可通过设置运行固定路线、按需调用或执行更为复杂的操作(任务)。MiR机器人通过可在首次使用机器人时创建或导入的地图定位并导航。内部地图包含确定的用于物流规划的位置(办公室、成品运输和生产车间等)。运行时,安全激光扫描仪确保机器人避开未绘制在地图上的动态障碍物(人员、设备)。
借助MiRCharge 48V充电桩,机器人可自动前往充电。只需定义充电任务和地图中的充电位置即可实现。
MiR600 可以使用下列附加组件:
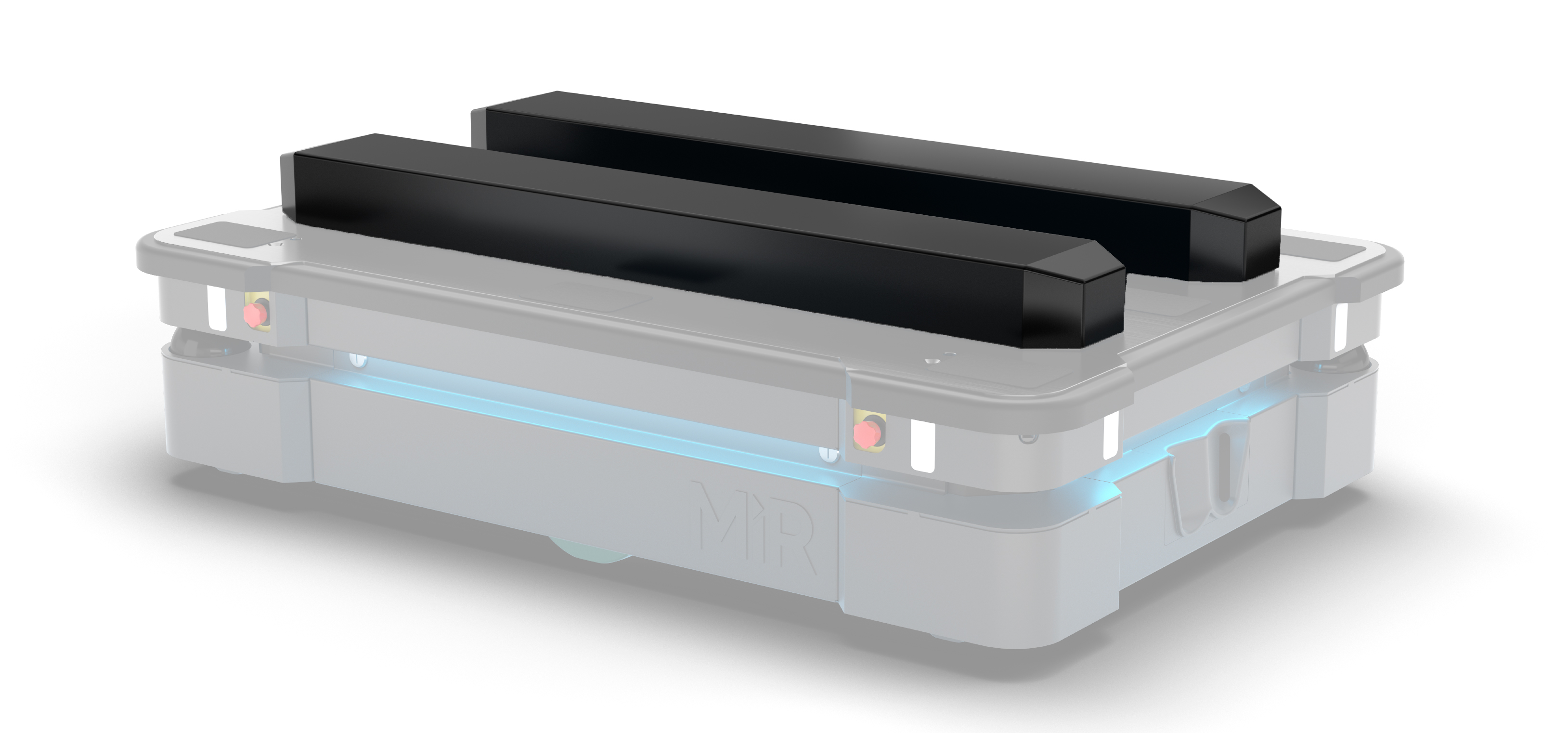
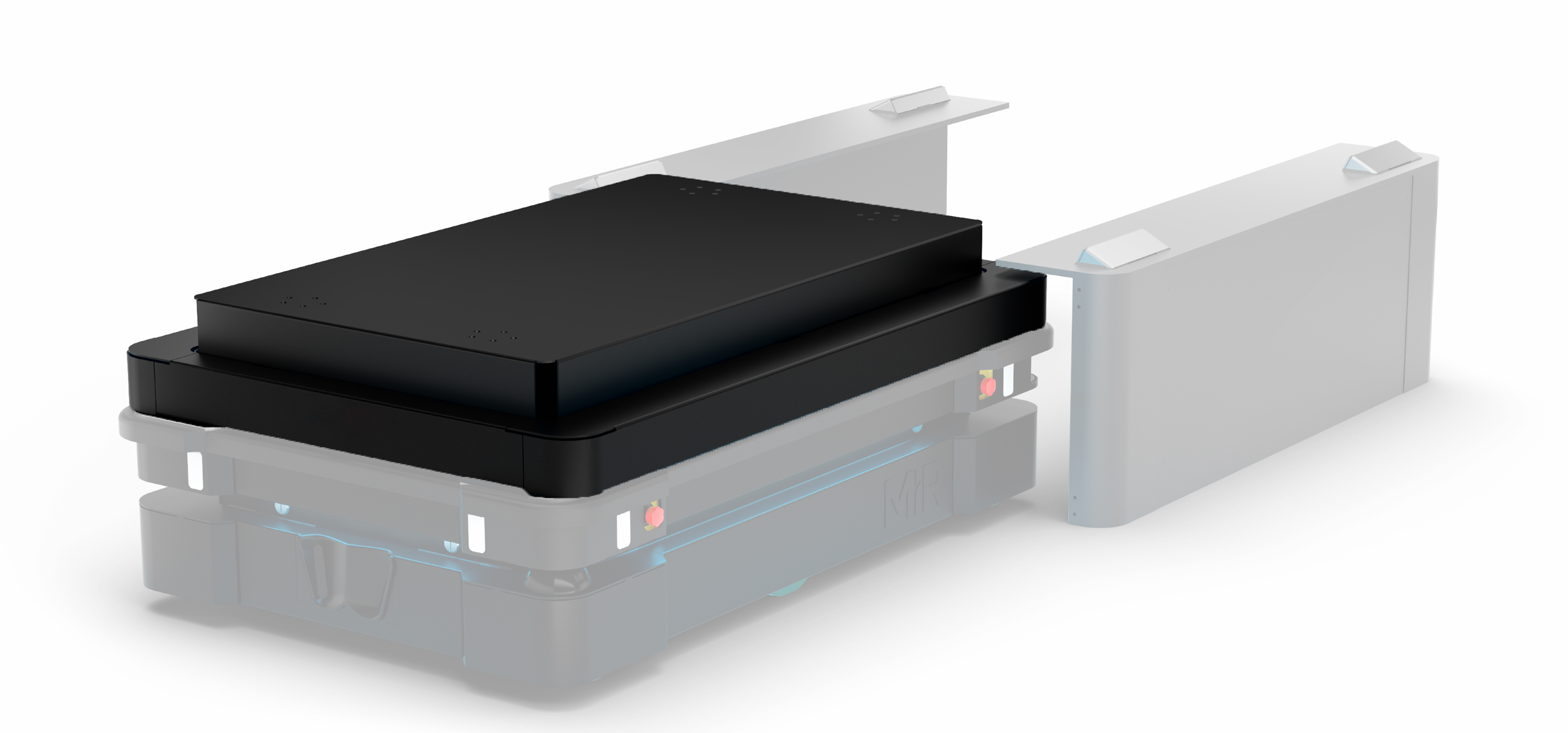
• MiR600 Lift
一款安装在MiR600 顶部的举升平台,可让MiR机器人能够在室内环境中自动运输符合美国标准的40x48 托盘。
• MiR600 EU Pallet Lift
一款安装在MiR600 顶部用于欧标托盘的托盘举升器,可让MiR机器人能够在室内环境中自动运输欧标托盘。
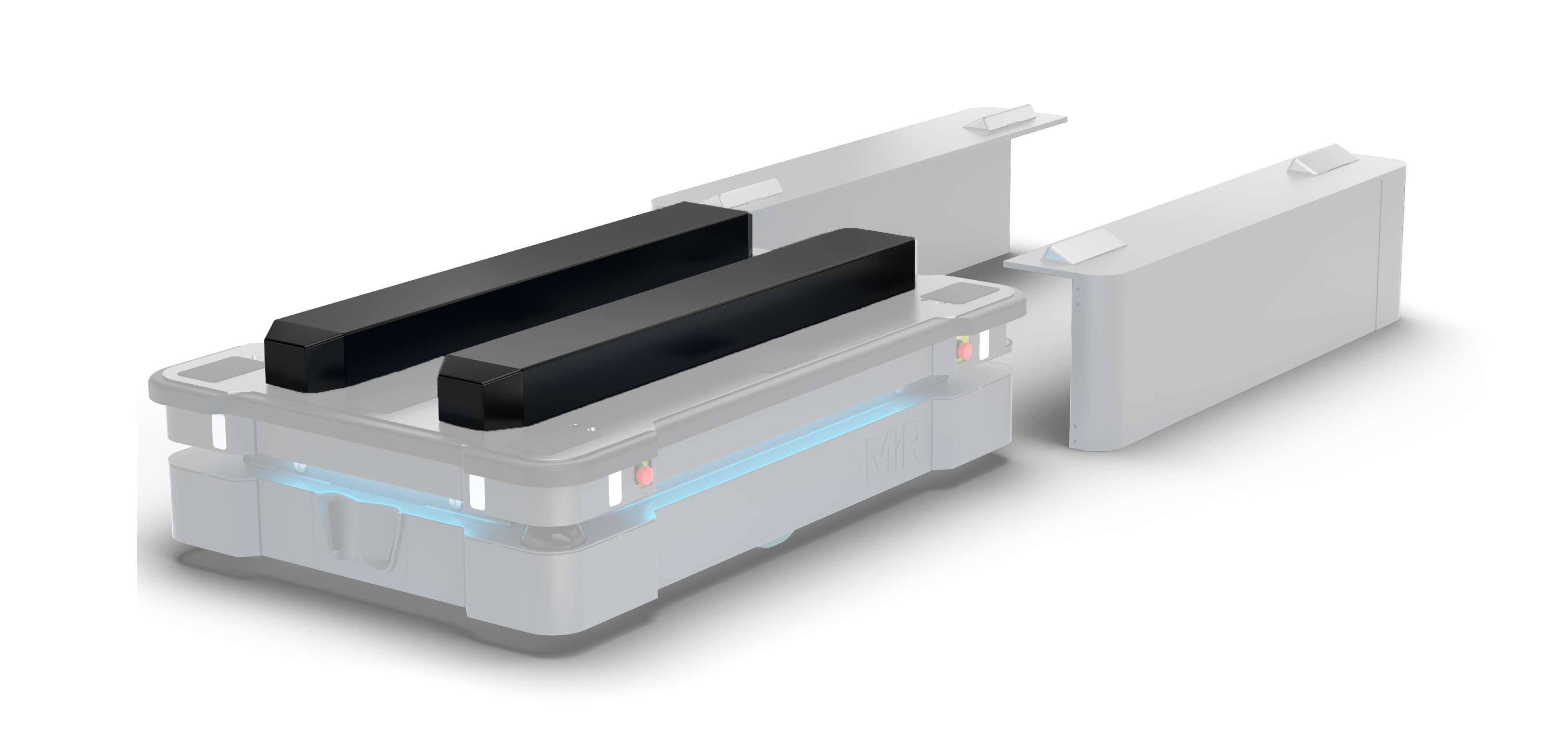
• MiR Lift Pallet Rack
需搭配MiR600 Lift 使用MiR Lift Pallet Rack。该举升器用于让MiR机器人能够自动从货架取放符合美国标准的40x48 托盘。
• MiR EU Pallet Rack
需搭配MiR600 EU Pallet Lift 使用MiR EU Pallet Rack。该举升器用于让MiR机器人能够自动从货架取放欧标托盘。
MiR600 的主要特性包括:
·在有人类活动的工作区域中行使
MiR机器人设计旨在与人类协作,并在高度变化的环境中安全、高效地运行,可穿过门口,出入电梯。
·全面路线规划和局部调整
MiR机器人能够自主导航以寻找到达目的地的最高效路径。当遇到地图上未标注的障碍物(例如人类和物体)时,它还会自动调整路径。
·高效运输重物
MiR机器人专为在各行各业中自动运输重量达600kg的重物而设计,从而解放员工,让他们能够专注于更高价值的活动。
·声光信号
MiR机器人持续发出光信号和声信号,指示当前模式,如等候任务、驶往目的地、目的地已到达或警报模式。
·用户友好和灵活
用户可在PC、平板电脑或智能手机上访问基于网络的用户界面来轻松操作和监控MiR机器人,并且无需任何相关经验便可以其进行编程。MiR机器人还可集成至 ERP 系统中,以便您打造全自动解决方案。
·“迷路”警报
MiR机器人在找不到前往目的地的路径时,会停止运行并打开黄-紫运行错误灯。此外,客户还可以使用自定义的“捕捉”操作来警告人员或采取其他措施。
·面对物体,自动减速
在检测到MiR机器人前方有障碍物时,内置传感器可确保MiR机器人减速。
·最适合的操作环境
MiR机器人可以在水平、干燥的地板上运行,MiR600 配备可提供 360 度扫描视角的最新激光扫描技术,可确保优化安全性。MiR600 的 3D 摄像头可以检测托盘且扫描范围为地面3cm至2米,另外,该机器人还能够识别并规避地面上的坑洞。
·内部地图
MiR机器人既可使用来自CAD系统的平面图,也可通过人工导航至其将要运行的整个站点来创建地图。在绘制地图时,机器人传感器检测墙、门、设备,随后基于该输入创建地图。创建地图后,位置和其他特性可添加至地图编辑器内。
·开放式接口支持不同应用程序
可在MiR机器人上安装定制顶部模块,如箱子、货架、举升装置、传送带甚或协作机器人手臂,满足一切您的应用所需。 顶部模块易于更换,机器人因此可以重新部署,用于不同任务。
·专为工业应用打造的稳健型机器人
MiR600 满足 ISO/EN 13849 标准,并符合针对重型及轻型工业环境的 EMC 要求。MiR600 专为工业应用而设计:与 MiR 另一款重载机器人——功能非常强大的 MiR1350 相结合,MiR600 成为市场上首批获得 IP52 评级的 AMR。由于防尘防水能力有所提高,这款移动机器人适用于更多的环境,例如,可以靠近敞开的门或其他暴露于水滴和灰尘的地方行驶。