
全面的安全性是协作移动机器人和自主移动机器人 AMR 的主要特性,这些机器人可以在动态环境中运行,并与人类一起工作。由于各行业对 AMR 的需求日益增长,提供确保安全的系统至关重要。 讨论安全问题时,需要区别实现日常操作自主安全导航的机器人特征,以及机器人内部集成的安全功能,以确保即使主要系统出现故障,机器人也能始终确保安全。
AMR 特点:MiR 机器人的传感输入确保安全导航
MiR AMR 日常操作的安全行驶模式依赖多传感器安全系统,通过将数据输入复杂的规划算法,帮助机器人确定行驶路线,并判断是否需要调整路径或立即安全停车以避免碰撞。
先进的双激光扫描仪方式进行导航并实时检测障碍
所有 MiR 机器人都配备了双激光扫描仪,分别位于机器人的前后两个角落,提供360度的视场 FoV。借助这种双激光方法,机器人能够在遇到无法移动的障碍物时安全后退,或者探测从后面或侧面接近的人,并在需要时停车或调整路线。作为第一家 AMR 制造商,MiR 使用最新最先进的激光扫描技术——SICK microScan 3。这些通过ISO 13849认证的激光扫描器符合类别3性能水平 d 安全标准,性能优于市面所有其他激光扫描器。借助 SICK microScan 3,机器人不受光线和灰尘的影响,而这些因素通常会严重影响机器人导航,而且这些激光扫描器的精度是其他类型激光扫描器的10倍。
双 3D 相机提升安全性
激光扫描仪是 MiR 机器人综合安全和导航系统的主要组成部分。此外,确保 MiR 移动机器人日常操作安全顺利还需要许多其他功能。
安装在机器人前侧的双 3D 相机可以帮助机器人探测0-1,700mm高的障碍物。在120°的水平视角下,机器人总能看到前进道路上的障碍物。相机可检测在安全激光扫描仪视场范围内外的障碍物。这使得机器人可以安全地围绕桌子移动,例如,桌子在激光扫描器的视场之上,但低于机器人的高度(包括顶部模块和负载)。还可以避开其他障碍物,如壁装机柜或货架。

用于检测脚部和托盘的接近传感器
MiR500 和 MiR1000 机器人还配备了24个接近传感器,安装在机器人的各个角落并指向地面。这些传感器专门检测低于激光扫描仪视场的脚部和托盘。AMR 行驶时,可以借助相机检测并绕开前方地板上的障碍物,但当它从静止状态转变为移动和转动时,激光扫描仪无法检测紧邻它且高度低于20cm的障碍物,例如脚部和空托盘等,这会导致危险情况发生。 在这里,MiR 机器人配备了其他AMR通常不具备的接近传感器,从而提升了安全性,而这对重载机器人至关重要,因为如果它们压过脚部,会造成严重伤害。

额外传感输入与软件提升安全性
MiR 机器人配备的其他传感器包括加速度计和陀螺仪,用于感测惯性力、加速度和旋转;每个轮子上都配备编码器以测量速度,并精确反馈给激光扫描仪,以检测机器人是否在潮湿的地板上打滑。
机器人的保护区域取决于机器人的速度。这使得机器人在非常接近障碍物时能够安全缓慢地行驶,如果几厘米范围内出现一个人或障碍物,机器人就会自动停车。
最后,还可以轻松为机器人编程来优化安全性。可以通过个人电脑、智能手机或平板电脑轻松在机器人地图上标记出禁区。其他指令编程也可以轻松实现,如定义首选路径或限制机器人在交通繁忙区域的速度。所有 MiR 机器人都配备独特的灯条,可以通过颜色变换提醒工作人员,还可以轻松设置声音提示,包括嘟嘟声、喇叭声或任何其他声音。
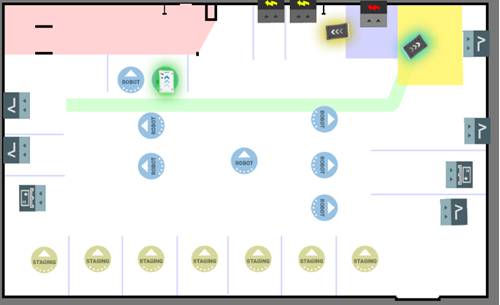
可以轻松更新机器人地图的不同区域,这些区域用不同的颜色区分。在这张地图上,您可以看到:
红色区域=禁区
绿色区域=首选区域
黄色区域=机器人发声区域
功能安全增加了 MiR 安全系统的可靠性
在没有外部安全措施的环境中,自主移动机器人与人一起搬运货物。有些AMR体积较小,只能承载小型货物,但重载 AMR 的负载较高,可以装载托盘或大型货物,最大重量可达1,000公斤。如果常规安全系统由于某种原因出现故障,重载 AMR 尤其容易造成伤害。例如,一种非常危险的情况就是电机控制器短路。如果没有配备额外安全功能,AMR 会全速运行而无法停车,这可能造成巨大危害。这只是 AMR 必须提供符合安全标准的功能性安全措施的一个例子,以解决固有安全设计措施(如传感输入)无法解决的潜在风险。
AMR 安全系统要求的性能水平
所有安全系统的设计都有一个基本前提,即任何系统都有可能发生故障。根据AMR最适用的安全标准 EN 1525,AMR的安全功能应根据 EN ISO 13849类别3性能水平d进行设计,它用于评估与安全相关的控制系统。所需性能级别作为风险评估的一部分而确定,其中危险情况被划分为5个性能级别,从 PL“a”(低)到PL“e”(高)。风险越大,安全系统的可靠性要求就越高。如果一个安全系统是 PLd 级,这意味着系统发生危险故障的概率是每小时 > 10-7到 > 10-6 次,相当于20年不到一次。类别是指用以达到特定性能水平的电路结构。类别3意味着电路是多通道结构,始终能够检测单个故障。
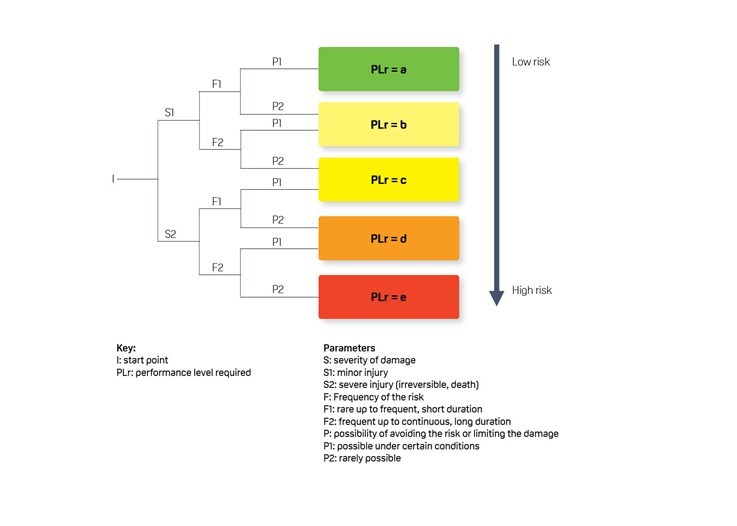
风险图用于确定指定安全功能所需的性能级别(PLr)。如果 AMR 系统发生故障,可能会对人造成严重的伤害,因此大多数安全功能都需要达到 PLd 级。
设计符合安全标准
MiR 机器人满足 EN 1525 和美国相应标准 ANSI / ITSDF 标准 B56.5-2012,产品设计面向未来标准,如 ISO/FDIS 3691-4、ISO/FDIS 10218、RIA 15:08以及UL 3100,配备各类相关安全功能,以确保即使主要安全功能发生故障,机器人也能做出反应确保安全。MiR 机器人的安全功能在 Sistema 报告中有记载,MiR 可以根据客户要求共享信息。
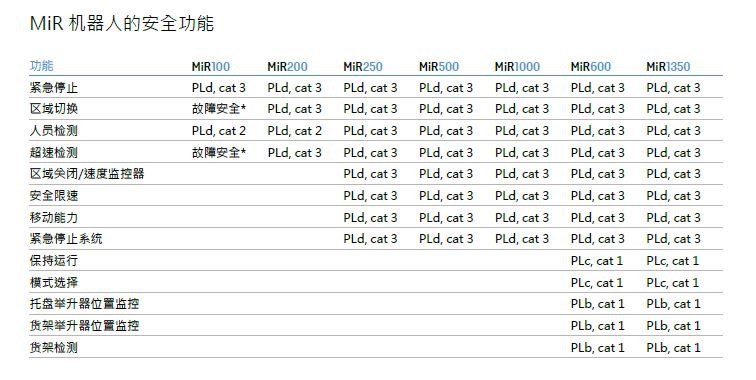
四大功能:紧急停车、区域切换、人员检测和超速检测是 AMR 的强制要求,所有 MiR 机器人都包含这些功能。这些功能可以确保机器人在发生故障时停车,因为如果发生故障,紧急停车会切断电力传动的电源。
五大安全功能:区域屏蔽、安全限制速度、安全保护停车、移动能力和系统紧急停车都是为了应对与负载和容量相关的危险,因此 MiR250, MiR500 和 MiR1000 包含这些功能。机器人在日常操作中也会主动使用这些功能。例如,当机器人停靠在托盘架上时,现场减弱用于减弱/减少保护区域;因为通常情况下,为了确保在人类周围时的安全性,重载机器人的保护区域相当大,而在行驶进入托盘架时,保护区域需要显著缩小。一旦机器人行驶出托盘架,保护区域将重新激活。同样,装卸货物时也使用安全保护停车和行走功能,以确保机器人在装卸货物时禁止行驶。当装卸完成后,这些功能将被停用,机器人可以再次行驶。
始终确保安全至上
投资 AMR 的重要考量是不能危及安全。必须始终以安全的方式使用 AMR,因为您的员工将与它在同一场所工作。因此,当您投资 AMR 系统时,必须考虑 AMR 的设计是否能够应对安全特性故障。
MiR 机器人配备了先进的多传感器安全系统和功能性安全措施,是安全的 AMR。MiR 机器人不仅符合当前和未来的安全标准,也是营造 AMR 与人类协作的安全工作环境的解决方案。
您还在为应用而烦恼吗? 现在联系我们详细了解,库崎智能科技有限公司作为MiR移动机器人指定经销商,专注于可定制化服务与解决方案。在线客服/免费热线:15814107663(微信同步)
公司主要提供:优傲协作式机器人|MiR移动机器人|台达SCARA机器人|Robotiq夹爪|Onrobot夹爪|复合机器人等主营业务。
适合应用场景有:汽车制造行业|3C行业|电子电气|机械加工|半导体|新能源|食品加工行业|医药行业|化工行业|教育行业|娱乐生活|其他行业等领域
欢迎立即预约体验,只要您的一个电话,或者一封邮件,库崎智能科技为您解决后顾之忧。
您还在为应用而烦恼吗? 现在联系我们详细了解,库崎智能科技有限公司作为MiR移动机器人指定经销商,专注于可定制化服务与解决方案。在线客服/免费热线:15814107663(微信同步)
公司主要提供:优傲协作式机器人|MiR移动机器人|台达SCARA机器人|Robotiq夹爪|Onrobot夹爪|复合机器人等主营业务。
适合应用场景有:汽车制造行业|3C行业|电子电气|机械加工|半导体|新能源|食品加工行业|医药行业|化工行业|教育行业|娱乐生活|其他行业等领域
欢迎立即预约体验,只要您的一个电话,或者一封邮件,库崎智能科技为您解决后顾之忧。

