
Modbus 是一种软件通信工具用于MiR移动机器人和其他设备之间进行通信,您可以根据需要启用或禁用它。
Modbus TCP 可用于MiR 机器人和其他设备之间进行通信,以实现以下目的:
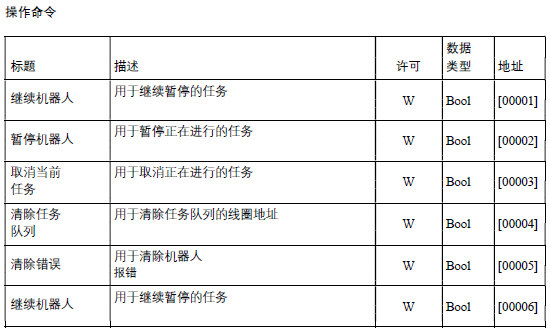
1、控制机器人的状态,如暂停/继续,取消当前的任务,清除任务队列,清除错误消息;
2、从机器人获取基本信息,如状态、电量百分比、错误消息等;
3、在机器人中读取和写入寄存器;
4、触发任务;
Modbus 如何在 MiR移动机器人上工作?
Modbus 从站/服务器在机器人上运行,并将信息在本地网络(192.168.12.X)或分配给MiR机器人的 IP地址段进行广播,MiR机器人会在标准端口 502 上侦听来自外部设备的命令。通常,设备将是一个 PLC 充当(master/client),MiR 机器人将是(slave/server)master/client 设备是负责轮询数据的设备。
一般来说PLC(master/client)与MiR机器人(slave/server)建立连接,机器人等待来自 PLC 的传入连接,建立连接后MiR机器人会响应 PLC 的查询直到 PLC 关闭连接。
多个master/client 可以同时连接到机器人,每个连接都是以线程进行运行的。
缓存数据是为了避免API 上的高频率请求负载,同时提供对任何请求的响应。
服务器可以响应以下功能代码:
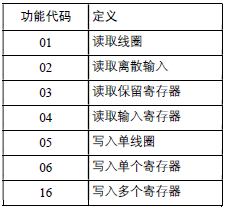
在 MiR 机器人中,线圈和离散输入的内容相互匹配,输入寄存器和保持寄存器也相互匹配。因此,您可以从它们获取相同的数据,但您只能将信息发送到 Coil 和 Holding 寄存器。
数据类型:
1、寻址
o MiR机器人使用的 Modbus 地址可在下面的图表中找到。
o Modbus 服务器使用0-based 的寻址方式。请注意,某些其他设备基于 1-based(例如 Anybus X-gateways),然后只需向该设备上的地址添加一个。(例如,机器人上的地址 3 将在 Anybus X网关上的地址 4)。
2、读/写方式
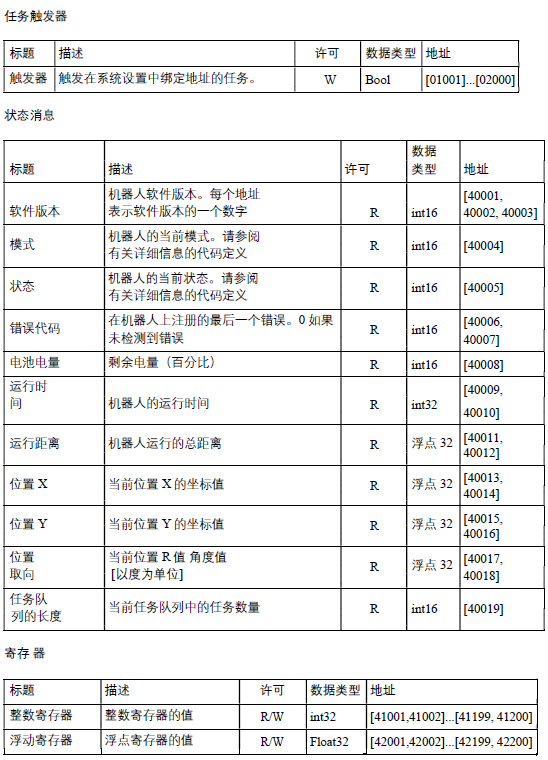
o 状态信息:只读。
o 寄存器:读写。
o 任务触发器:可写,如果正在使用触发器返回值始终为 0。
o 操作命令:可写,读取返回值为 0。
3、整数寄存器
o 由于Modbus 通信编码为 16 位,所以MiR 机器人将32bit 的整数数据存放在相邻的两个地址中,MiR Modbus 使用big endian 编码作为默认配置。此方法应用于所有存放机器人信息的整数寄存器。
4、浮点寄存器
o MiR Modbus 使用 IEEE 754 ISO 标准对浮点值进行编码。
Modbus 数据地址引用
设置 Modbus
要启用机器人上的 Modbus 功能,请访问系统 > 设置 > 功能并将 Modbus 设置为 True。滚动到页面底部并保存设置。
默认情况下,您将能够在 PLC 上设置 Modbus 主机,以获取机器人的状态消息并实现对机器人内部寄存器读写的操作,此外如果您需要使用触发器功能来触发任务,则需要按如下所述设置完成触发器配置。
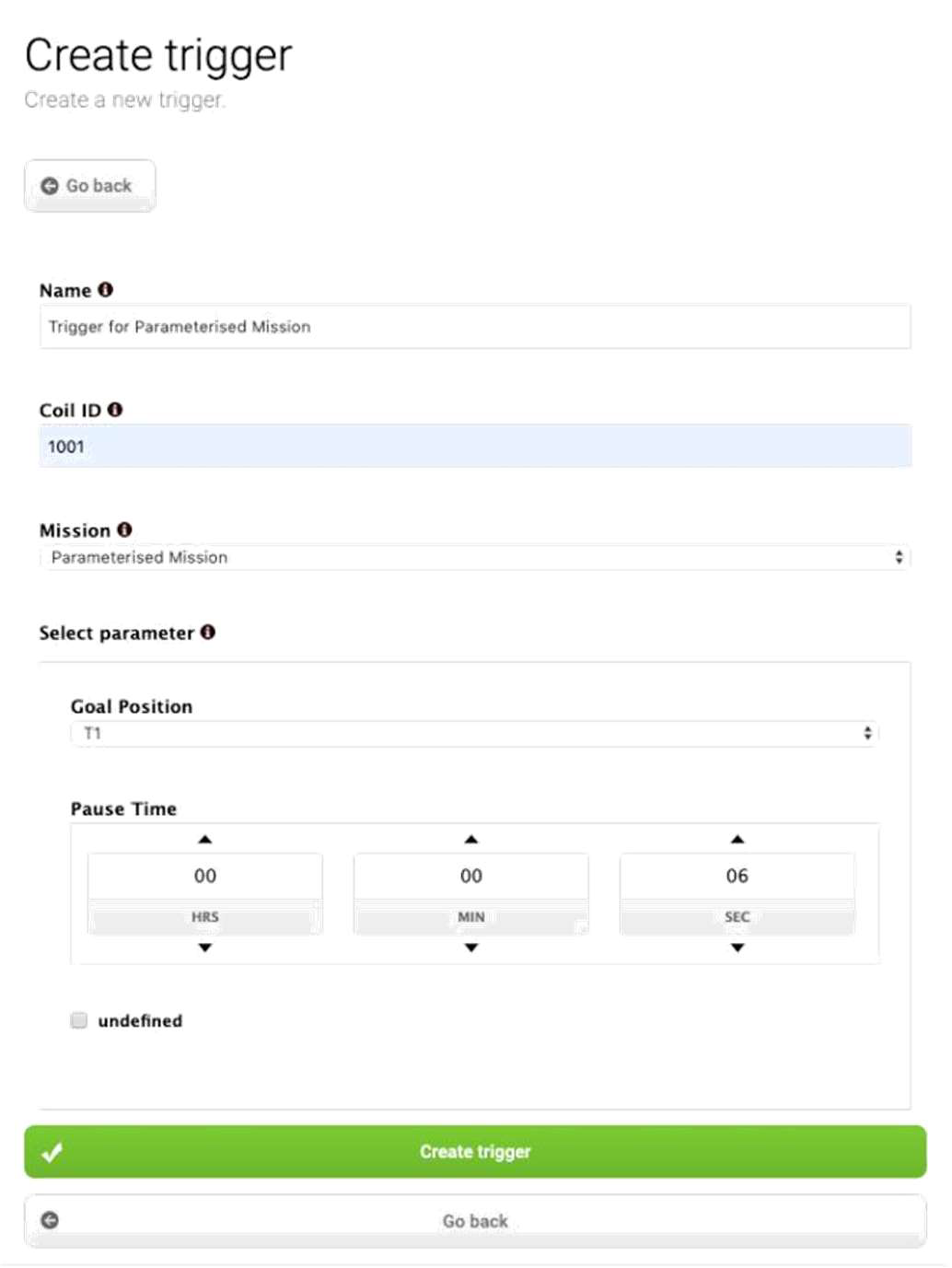
打开 Modbus 功能并创建任务后,转到系统 > 触发器 > 创建触发器以创建新的触发器。线圈 ID可以分配给 1001 和 2000 之间的任何整数。创建触发器后,一旦通过 Modbus 将指定线圈设置为True,机器人将触发任务。
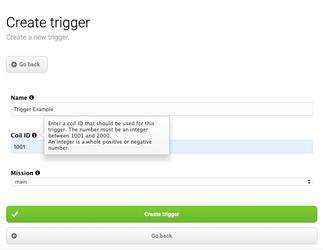
如果要在参数化任务(具有变量的任务)上设置触发器,则必须在将其分配给线圈之前填写所有变量,如下所示。
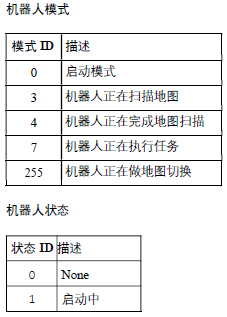
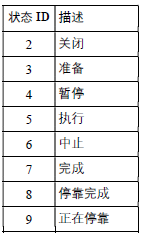
代码定义
您还在为应用而烦恼吗? 现在联系我们详细了解,库崎智能科技有限公司作为MiR移动机器人指定经销商,专注于可定制化服务与解决方案。在线客服/免费热线:15814107663(微信同步)
公司主要提供:优傲协作式机器人|MiR移动机器人|台达SCARA机器人|Robotiq夹爪|Onrobot夹爪|复合机器人等主营业务。
适合应用场景有:汽车制造行业|3C行业|电子电气|机械加工|半导体|新能源|食品加工行业|医药行业|化工行业|教育行业|娱乐生活|其他行业等领域
欢迎立即预约体验,只要您的一个电话,或者一封邮件,库崎智能科技为您解决后顾之忧。
代码定义
您还在为应用而烦恼吗? 现在联系我们详细了解,库崎智能科技有限公司作为MiR移动机器人指定经销商,专注于可定制化服务与解决方案。在线客服/免费热线:15814107663(微信同步)
公司主要提供:优傲协作式机器人|MiR移动机器人|台达SCARA机器人|Robotiq夹爪|Onrobot夹爪|复合机器人等主营业务。
适合应用场景有:汽车制造行业|3C行业|电子电气|机械加工|半导体|新能源|食品加工行业|医药行业|化工行业|教育行业|娱乐生活|其他行业等领域
欢迎立即预约体验,只要您的一个电话,或者一封邮件,库崎智能科技为您解决后顾之忧。

