
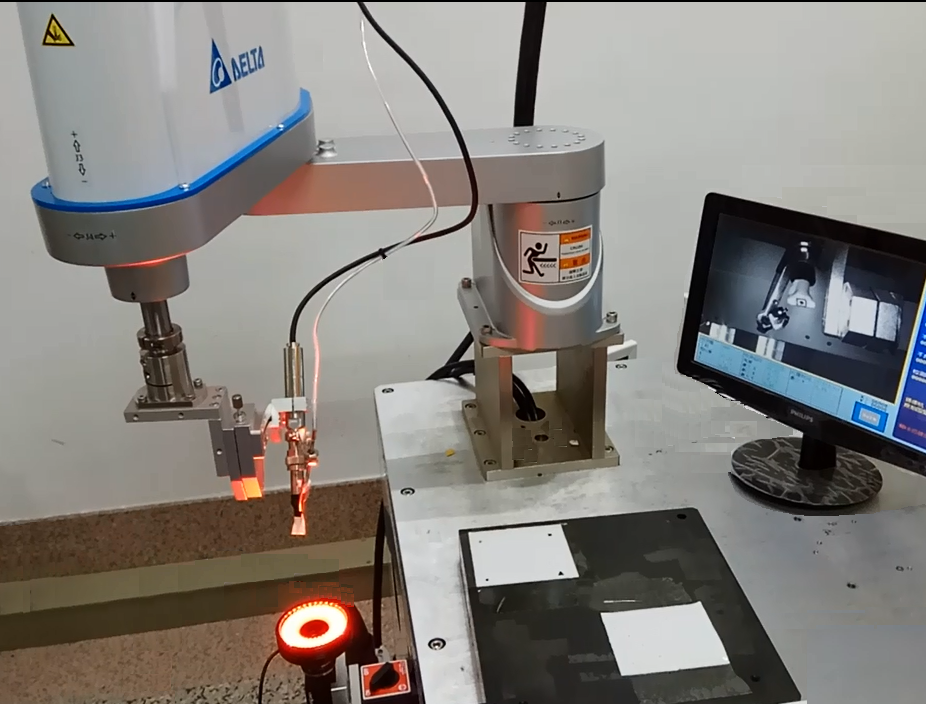
台达采用高弹性、高整合性的台达SCARA工业机器人,以及外围自动化零件 (如伺服系统、视觉系统、线性模块等),不仅满足单机或结合移载平台应用,更可因应产线变化,满足制程应用需求。为了充分立足制造业实际情况,以解决用户生产中的难点和痛点为出发点,确保SCARA工业机器人能够最大程度满足用户的实际生产需求。本文将详细为大家介绍一种引入下视觉实现自动更正SCARA工业机器人的工具坐标系方法。
由于SCARA工业机器人校正Tool的常规方法需要调试人员教导三个及以上的位置,旋转不同的RZ轴位置,其中Z轴高度必须维持不变,并尽量维持在同一个尖点上,这种示校方法耗时较长,同时会由于人为因素引入较大的误差。因此引入下视觉实现自动更正SCARA工业机器人的工具坐标系,不仅可以减轻调试人员的工作量,且能够有效的减少人为因素对精度的影响,提高工具坐标系的校正精度。
一、基本流程
1、相机通过识别Tool中心的Mark点,将获取的像素坐标发送至SCARA工业机器人控制器中。
2、SCARA工业机器人根据返回的像素坐标与中心坐标的偏移量,计算出在XY方向移动的距离。
3、依据计算出移动的距离移动SCARA工业机器人,最终让Tool的中心在图像的中心位置。
4、按固定角度旋转RZ,再执行第1-3步,控制器会自动记录RZ旋转了0°,60°,120°时的坐标。
5、根据记录的三个位置坐标计算出SCARA工业机器人Tool的宽度和角度。
6、将计算出的参数保存至控制器中,后续使用时,直接切换到该Tool参数下即可。
二、准备工作
1、安装相机,调整镜头焦距、光源至合适亮度(当相机位置移动或者焦距更改过,需重新校准)。
2、相机安装方式:固定朝上。
3、台达机械手参数检查,确认机械臂参数正确,否则会影响校正精度。
4、将机械臂Tool的中心位置贴上带有Mark点的标签,便于相机识别。
三、校准步骤
1、安装调整相机
安装并调整相机,使得相机能够在视野范围内有且只有一个Mark点(Tool中心)能被抓取到
2、输入数据
输入相机的分辨率以及视野的长和宽(估算即可)
3、移动校正
将SCARA工业机器人的Tool中心移动至视野范围内,启动校正程序即可保存
四、校准函式
J4AutoCalibCamTool ( TrigCamIO, StartPt, TF_ID, View_X, View_Y, Move_Angle )
参数含义:
TrigCamIO:触发相机拍照之输出IO编号(1~12);
StartPt:自动更正起始点位;
TF_ID:自动更正Tool的编号(1~9);
View_X:相机X方向视野大小(单位:mm);
View_Y:相机Y方向视野大小(单位:mm);
Move_Angle:自动更正过程中单步转动RZ轴角度大小。
五、范例程式
function CalibrateTest()
J4AutoCalibCamTool (1,1001,1,95,70,20)
end
该程序表示:SCARA工业机器人DO1触发相机拍照,相机视野大小为95mm×70mm,其中自动更正起始点位编号为1001,自动更正Tool完成后将参数保存至Tool 1内部,自动更正过程中RZ轴单步转动角度为20。
六、校准验证
校正完成后,可以在校正后的Tool参数下,旋转RZ,SCARA工业机器人会绕着该Tool的中心旋转,移动至该Tool中心的目标位。
库崎智能科技为台达SCARA机器人代理商,为客户提供完善的售后与保修服务,库崎智能专注于可定制化服务与解决方案。在线客服免费热线:15814107663(微信同步)。
只要您的一个电话,或者一封邮件,库崎智能科技为您解决后顾之忧。

