
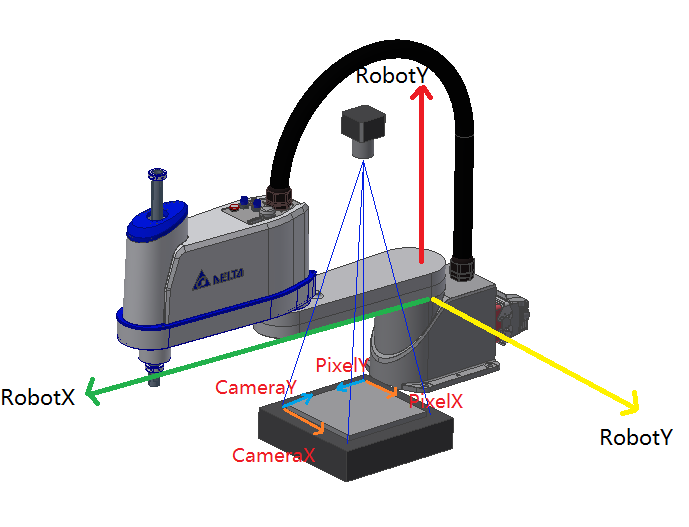
在很多行业,由于人工成本、生产效率以及精确性等各方面的因素,用SCARA机械手取代人工来搬运、加工和检测是大势所趋。“机械手”SCARA工业机器人具有占地空间小,精度高,速度快等特点,特别适用于3C电子组装、涂胶、锁螺丝、焊锡、插件、上下料等应用场合。而工业现场使用视觉时一般需要相机坐标系和机械手臂坐标系的转化,这里介绍一种台达SCARA机械手与相机坐标统一的说明,将工业相机的像素坐标与SCARA工业机器人坐标进行校准,建立转换关系。
一、基本流程
1、相机通过以太网或串口与台达SCARA工业机器人通讯,按校正函式的要求获取相机发送过来的数据。
2、按照后面介绍的校准步骤,记录台达SCARA工业机器人校准点坐标与对应的视觉像素坐标。
3、使用校准函式,建立台达SCARA工业机器人与视觉坐标之间转换关系。
4、视觉工作时,将检测到的工件坐标发送给台达SCARA工业机器人,其根据坐标转换关系,将像素坐标值转换为自身坐标后再去进行抓取或装配等动作。
二、准备工作
1、安装相机,调整镜头焦距、光源至合适亮度(当相机位置移动或者焦距更改过,需重新校准)。
2、台达SCARA工业机器人手参数检查,确认手臂参数正确,否则影响校准精度。
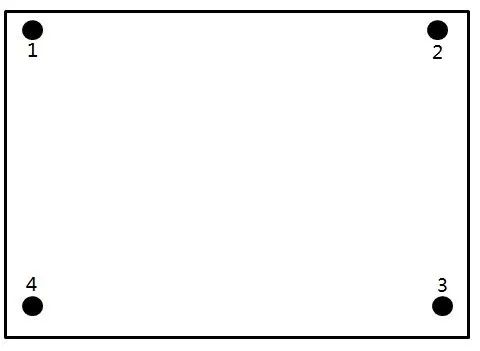
3、制作4点图校准板,如下图所示。
4、制作SCARA工业机器人工件坐标的校准工具,一般要求末端是尖端,方便对位,可稳定安装在Z轴或抓手上。
三、相机安装方式
1、固定安装:相机固定向下/向上。
使用固定安装,相机无法移动,拍摄范围小,但是视觉检测的时间一般可以与SCARA工业机器人工作的时间并列运行,节省节拍时间。
2、移动安装:相机安装至台达机器人J4轴。
使用移动相机,相机随SCARA工业机器人移动,拍摄范围大,但是视觉检测前,必须有一定的静止时间(0.2s~0.5s)。视觉检测时,SCARA工业机器人一般需要停止不动,不能进行其他工作,整体节拍时间会拉长。
四、校准步骤
相机固定安装(向下)
- 使用四点图校准板
- SCARA机器人末端安装校准治具
- 示教治具末端的工具坐标Tool n
- 按照四点图的顺序,SCARA机器人末端依次对准4个位置,在DRAStudio中选择对应的Tool n,并保存点位(如保存到P1~P4)
- 移开SCARA机器人,视觉识别四点图上的4个点像素坐标,同样按照四点图顺序,将其像素坐标XY依次保存(如保存到P5~P8)
相机固定安装(向上)
- SCARA机器人可以在相机视野中移动,不需要四点图校准板
- 在SCARA机器人治具上找一个视觉容易识别且唯一的特征点,建议圆形或圆孔。或SCARA机器人抓取需要识别的工件,在工件上找特征
- 使用DRAStudio,以上述特征点为Tool尖端,示教工具坐标Tool n
- 按照四点图的顺序,依次将特征点移动到相机视野中的左上→右上→右下→左下四个位置,共移动4次,并在DRAStudio中选择对应的Tool n,并保存点位(如保存到P1~P4),同时视觉依次抓取4个特征点的中心像素值并保存(如保存到P5~P8)
移动安装相机校准(相机安装在J4轴)
- SCARA机器人末点安装校准治具,并在相机工作视觉平面上找一个容易识别且唯一的特征点
- 示教校准治具末端的工具坐标Tool n
- 将治具末端对准特征点,在Tool n下保存该位置为P0
- 将相机移动到特征点上方,让特征点按照四点图的顺序,即位于相机视野的左上→右上→右下→左下四个位置,并在DRAStudio中选择对应的Tool n,并保存点位(如保存到P1~P4),同时视觉依次抓取4个特征点的中心像素值并保存(如保存到P5~P8)
五、校准函式
固定向下:iTrans = Point_Trans_CamDown(P1,P2,P3,P4,P5,P6,P7,P8)
固定向上:iTrans = Point_Trans_CamUp(P1,P2,P3,P4,P5,P6,P7,P8)
J4轴移动相机:iTrans = Point_Trans_CamJ4(P0,P1,P2,P3,P4,P5,P6,P7,P8)
辅助函式:Point(x,y)
校准参数保存于iTrans中
校准函式ret = Point_Calibrate(P,iTrans),其中返回值ret.x、ret.y为转换后SCARA工业机器人值。其中相机固定向下或者固定向上安装时,返回值ret.x、ret.y可直接使用;相机安装于J4轴时,需要将返回值ret.x、ret.y分别与拍照位的机械手X、Y值相加,相加之后值即可使用。
六、范例程式
固定相机/向下、向上
v_x = 100 --拍摄工件的视觉坐标x
v_y = 100 --拍摄工件的视觉坐标y
P_t = Point(v_x,v_y) --转换前视觉坐标为P_t
P_R = Point_Calibrate(P_t,iTrans) --转换后的SCARA工业机器人坐标为:P_R
移动相机/ J4轴
移动相机拍照时,需要将机械手拍照的位置(Tool n)也计算进去
v_x = 100 --拍摄工件的视觉坐标x
v_y = 100 --拍摄工件的视觉坐标y
P_t = Point(v_x,v_y) --转换前视觉坐标为P_t
P_tR = Point_Calibrate(P_t,iTrans) --转换后的SCARA工业机器人坐标为:P_tR
P_R = Point (P_tR.x + Cam.x, P_tR.y + Cam.y) --转换后SCARA工业机器人坐标加上拍照时SCARA工业机器人坐标等于工件实际坐标P_R
七、校准验证
校准完成后,可以在相机视野中找任意一点,将其视觉坐标进行转换,在对应的工具坐标下,让SCARA工业机器人的工具末端运动到相应的位置,看是否准确到达,若达到,则表示视觉校准是准确的。
库崎智能科技为台达SCARA机器人代理商,为客户提供完善的售后与保修服务,库崎智能专注于可定制化服务与解决方案。在线客服免费热线:15814107663(微信同步)
只要您的一个电话,或者一封邮件,库崎智能科技为您解决后顾之忧。

