
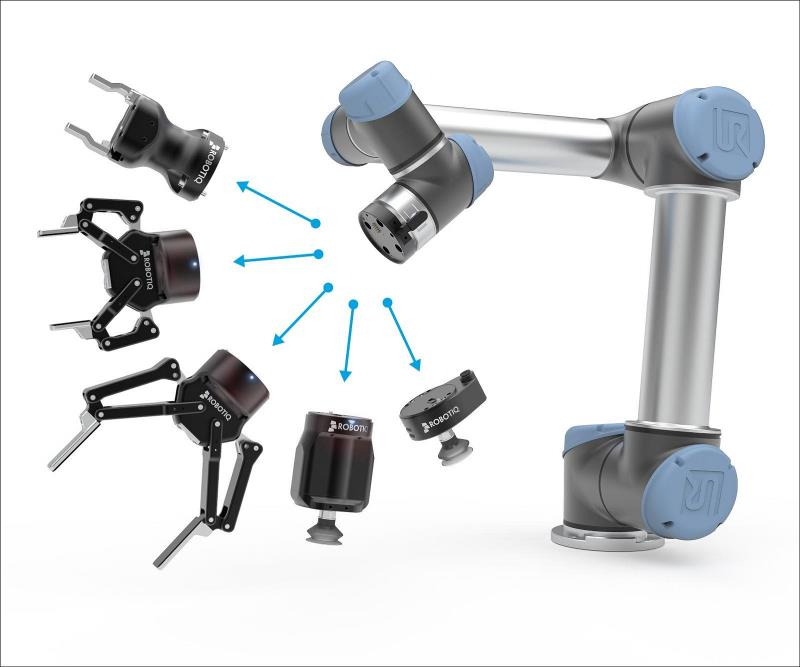
Robotiq电动夹爪包括2-Finger和3-Finger型号。与气动夹爪不同,电动夹爪的动力源是电能,需要通过电机驱动夹爪的开合。

以下是Robotiq电动夹爪的原理:
传动机构:Robotiq电动夹爪包括一个传动机构,该机构将电机的动力转换为夹爪开合的力和运动。
电机:Robotiq电动夹爪的动力来源是一个电机。电机转动的方向和速度决定了夹爪的开合状态。
控制系统:Robotiq电动夹爪通过连接到一个控制系统来控制其行为。控制系统运行软件程序,使夹爪能够对特定目标物品执行所需的操作。
传感器:Robotiq电动夹爪的一些型号还包括传感器,例如,位置传感器或力传感器。传感器可以监测夹爪的开合状态、夹持力等参数,并将这些信息反馈给控制系统。这样,操作人员或控制器可以根据需要对夹爪进行微调。
总之,Robotiq电动夹爪结构简单,易于控制,同时也具有高度的精度和可定制性。
Robotiq夹爪的设计主要有以下几个特点:
精度高:Robotiq夹爪能够提供高精度的夹紧力和夹持力,从而适用于需要高精度操作的应用场景。
极速响应:Robotiq夹爪可以快速响应,开合速度快,能够提高机器人的工作效率。
灵活可定制化:Robotiq夹爪可以根据客户需求进行定制,适用于不同的应用场景和夹取对象。
安全性高:Robotiq夹爪在设计时充分考虑了安全因素,能够避免因夹爪故障导致人员伤害等事故发生。
库崎智能科技为Robotiq夹爪中国代理商,为客户提供完善的售后与保修服务。即插即用方案让客户快速部署,库崎智能专注于可定制化服务与解决方案。在线客服免费热线:15814107663(微信同步)
只要您的一个电话,或者一封邮件,库崎智能科技为您解决后顾之忧。

