
有三种主要情况,UR机器人可能在移动到某个位置时遇到问题,或者因为机器人不可能到达所需的位置,或者因为它不可能从机器人关节的当前位置到达那里。在这里,我们将这些情况大致归类为奇点,并逐一解释。
UR机器人工作区
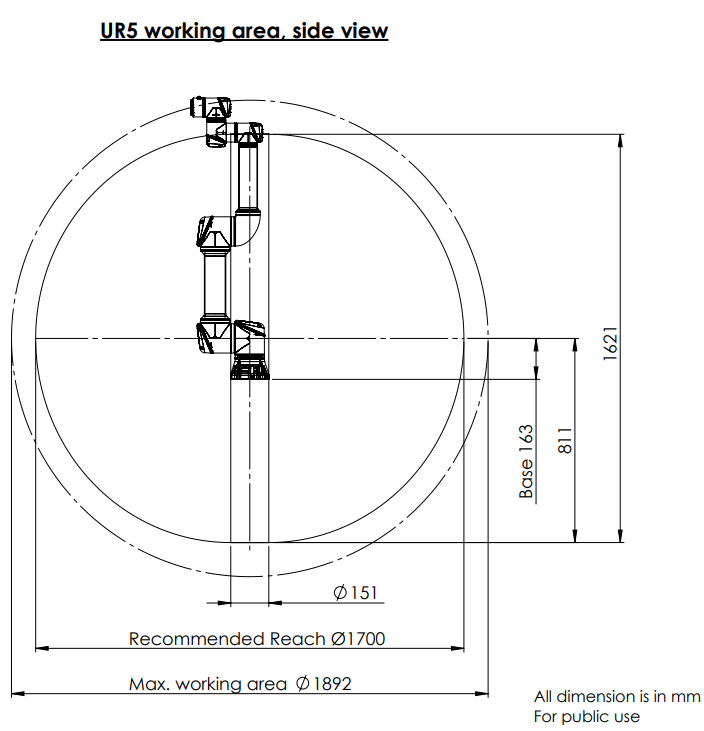
UR机械臂的工作空间是球形的,在工作区域图中,您可以在支撑点下找到它,它用两个同心圆表示,一个较小的标记为“推荐范围”,一个稍大的标记为“最大值”。工作区域”。在工作空间的中心,在基础接头的正上方和下方有一个柱子,在柱子内部也有一些限制机器人的运动。以下示例来自UR5e机器人工作区域图,可在此处找到:UR机器人工作区域。
1、外部工作区限制
下面的动画显示在推荐的到达范围内(以蓝色表示),机器人可以将工具移动到几乎任何方向的任何位置。当在推荐范围之外的区域内工作但仍在最大工作区域内(以灰色表示)时,大多数位置都可以到达,但是对工具方向有限制,因为在某些情况下机器人在物理上无法达到足够远的距离。

怎么避免
将设备安排在机器人周围以避免在推荐的工作空间之外工作,或者如果不可行,请选择具有较长范围的UR机器人。
2、内部工作区限制
建议避免机器人基座正上方和下方的柱子中的机器人运动(在下面的动画中以灰色表示),因为由于关节在机器人手臂上的布局方式,许多位置/方向将在物理上无法到达。此外,您可能会遇到在此圆柱体外部空间中执行线性运动的问题(以橙色表示),因为相对较慢的工具速度需要基础接头的非常高的旋转速度,从而使一些工具运动无法实现或不安全。

怎么避免
以这样的方式布置机器人任务,即不必在中心圆柱体中或靠近中心圆柱体工作。如果这是不可避免的,请尽可能使用MoveJ而不是MoveL,因为这不需要运动转换,也不受奇点影响。您还可以考虑将机器人底座安装在水平表面上,以将中心圆柱体从垂直方向旋转到水平方向,从而可能使其远离任务的关键区域。
3、手腕对齐奇点
肩部,肘部和腕部1个关节都在UR机器人的同一平面内旋转,如下面动画中编号为1,2和3的箭头所示。然而,当我们将腕关节2(在动画中标记为4)的运动与这个相同的平面对齐时,通过将其移动到0度或180度的角度,我们限制了机器人的运动范围,无论该区域是什么工作区。

怎么避免
以这种方式布置机器人任务,使得不必以这种方式对准机器人腕关节。或者偏移工具的方向,以便工具可以水平指向而不会出现有问题的手腕对齐。
您还在为应用而烦恼吗? 现在联系我们详细了解,库崎智能科技有限公司作为UR机器人指定经销商,专注于可定制化服务与解决方案。在线客服和免费热线:15814107663(微信同步)
公司主要提供:优傲协作机器人|MiR移动机器人|台达SCARA机器人|Robotiq夹爪|Onrobot夹爪|复合机器人等主营业务。
适合应用场景有:汽车制造行业|3C行业|电子电气|机械加工|半导体|食品加工行业|医药行业|化工行业|教育行业|娱乐生活|其他行业等领域
欢迎立即预约体验,只要您的一个电话,或者一封邮件,库崎智能科技为您解决后顾之忧。

